Material Handling End of Arm Tooling
General
Material Handling End of Arm Tooling (EOAT), or end effector, is manipulated through programmed sequences to perform specific part handling and transfer functions. Typically, the robot controller will control the gripper clamps using digital Input / Output (I/O) modules. Each material handling EOAT is made for a specific application.
The Material Handling Robots are as follows:
- 2V12-V01AR41
- 2V12-V01AR42
Major Components
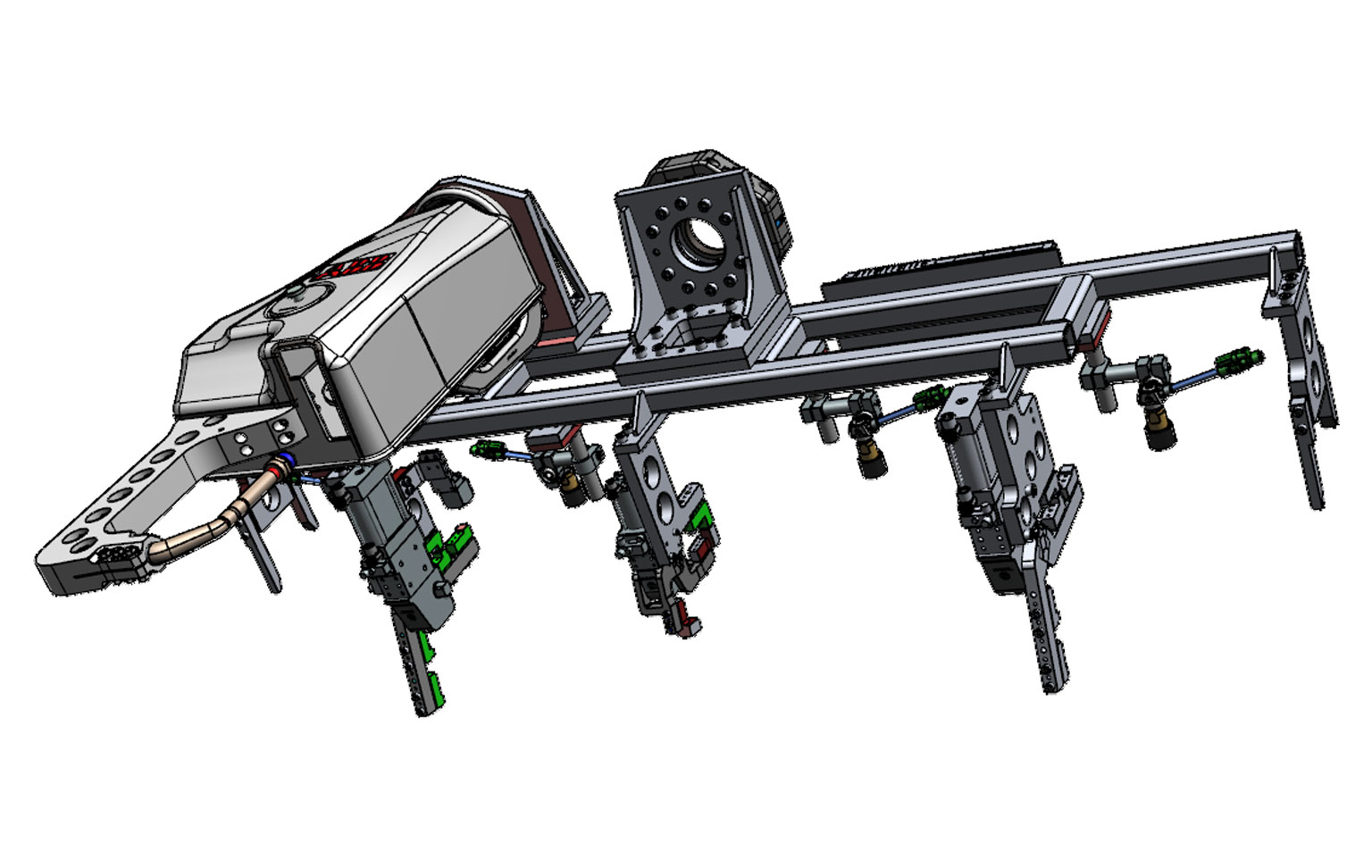
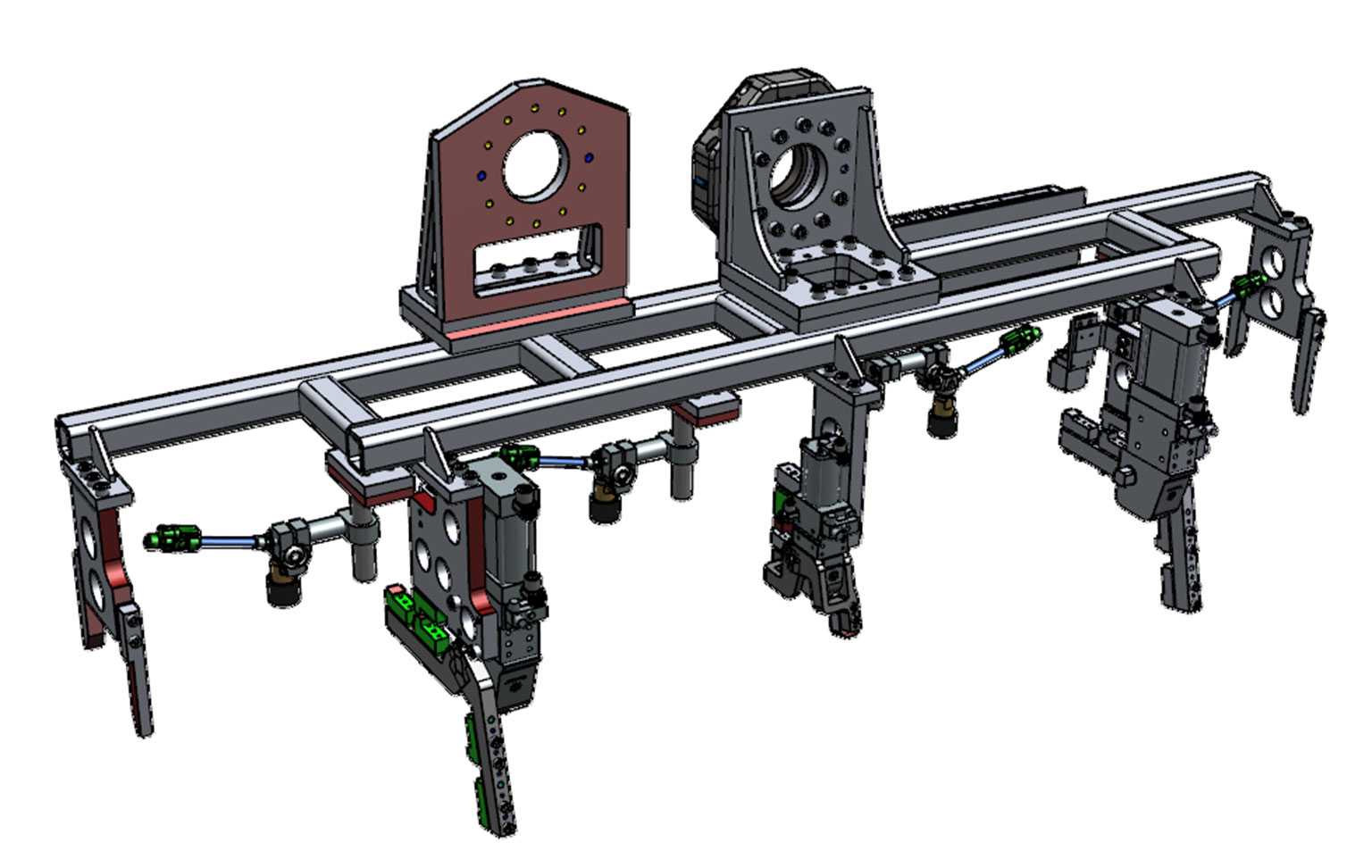
The Material Handling End of Arm Tooling (EOAT) features the following internal components.
| Item | Description | Function |
|---|---|---|
| A | Tunkers Clamp | Secures the part during the transportation of the part. |
| B | Pneumatic Air Panel | Controls the pneumatics for the material handler. Also sends and receives signals to the Programmable Logic Controller (PLC). |
| C | Manual Tool Changer | Swaps out parts that are located in the EOAT Storage Rack. |
| D | Weld Gun | Attached spot weld gun that is used and switched out with the EOAT Storage Rack. |