ABB Robots
General
There are three (3) ABB IRB Robots located on the 2V08 Sideskin Roof Outer Cell. These robots are 6-axis robots used to manipulate the welders, cameras, material handling, or other End of Arm Tooling (EOAT) in the station. Each robot has an individual ABB IRC5 robot controller and weld controller located outside of the fencing that control robot functionality. Each welding robot also has a tip dresser and tip changer associated to it.
These robots are multi-axis articulating robots with moveable joints driven by servo motors. The motors are equipped with resolvers or encoders that tell the robot controller the robot's location and travel speed and provide positional feedback.

Major Components (IRB 4400)
There is one (1) ABB IRB 4400 Robot located in the 2V08 Sideskin Roof Outer Cell. This is robot 2V08=V02AR181, which controls the laser cutting End of Arm Tooling (EOAT) in the laser cutting booth.
The ABB IRB 4400 Robot features the following components.
| Item | Description | Function |
|---|---|---|
| A | Axis 1 | Allows the entire robot to rotate around the base of the robot. |
| B | Axis 2 | Horizontal motion of the robot's upper arm, also known as the shoulder joint or or horizontal translation motion. |
| C | Axis 3 | Arm motion, allowing the axis to move up and down along a vertical axis, perpendicular to the ground. |
| D | Axis 4 | Wrist motion that allows the axis to rotate around a vertical axis. |
| E | Axis 5 | Rotational motion of the robot's tool or end effector around a vertical axis. |
| F | Axis 6 | Rotational motion of the robot's wrist around its own axis. |

Major Components (IRB 7600)
There are two (2) ABB IRB 7600 Robots located in the 2V08 Sideskin Roof Outer Cell. They are the following robots:
- 2V08=V01AR201
- 2V08=V01AR181
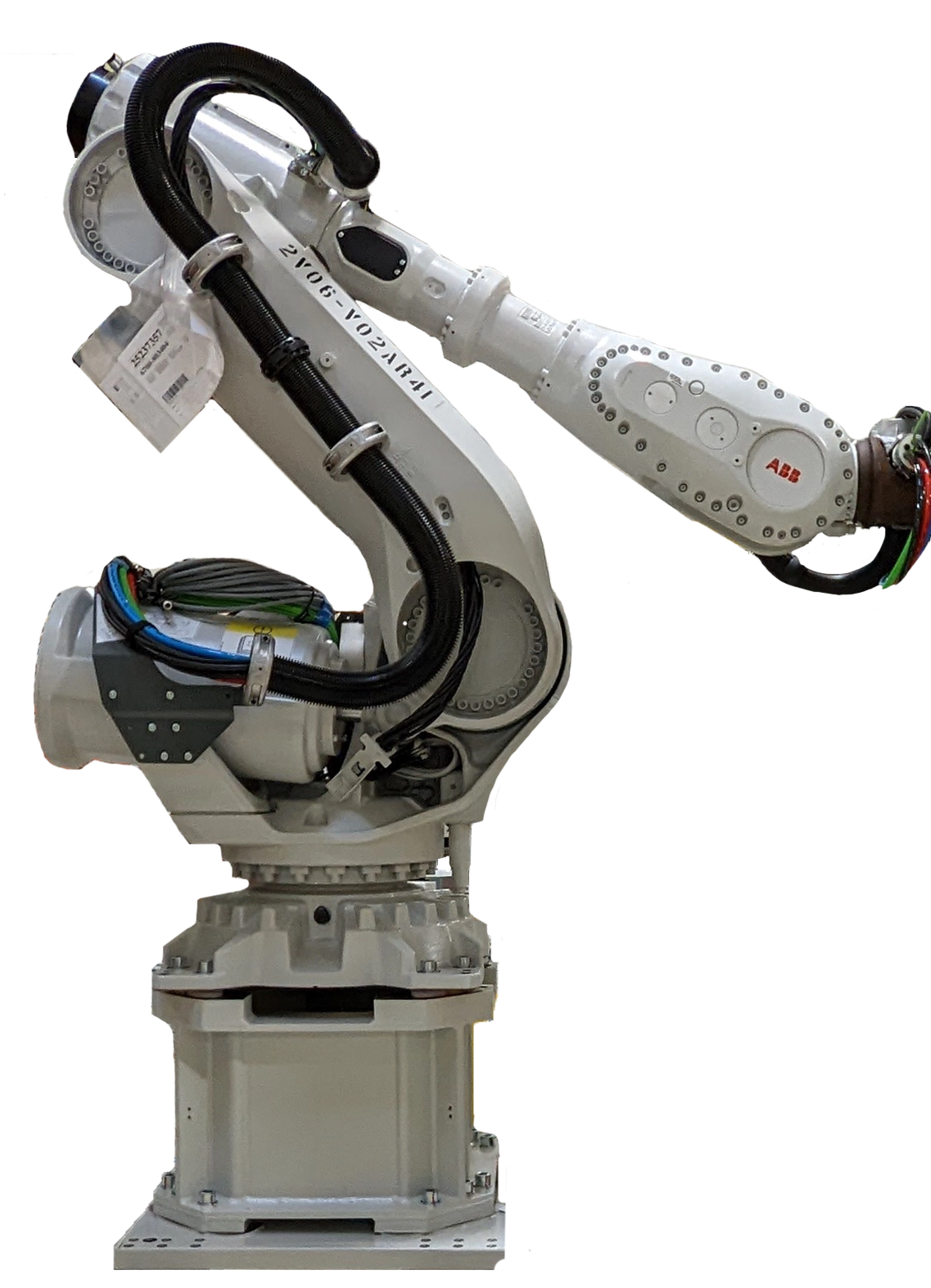
The ABB IRB 7600 Robot features the following components.
| Item | Description | Function |
|---|---|---|
| A | Axis 1 | Allows the entire robot to rotate around the base of the robot. |
| B | Axis 2 | Horizontal motion of the robot's upper arm, also known as the shoulder joint or or horizontal translation motion. |
| C | Axis 3 | Arm motion, allowing the axis to move up and down along a vertical axis, perpendicular to the ground. |
| D | Axis 4 | Wrist motion that allows the axis to rotate around a vertical axis. |
| E | Axis 5 | Rotational motion of the robot's tool or end effector around a vertical axis. |
| F | Axis 6 | Rotational motion of the robot's wrist around its own axis. |
| G | Counterbalance | Keep weight proportionately balanced while moving. This offsets the robot's arm weight, providing stability and reducing the load on the robot's motors. |