Material Handling End of Arm Tooling
General
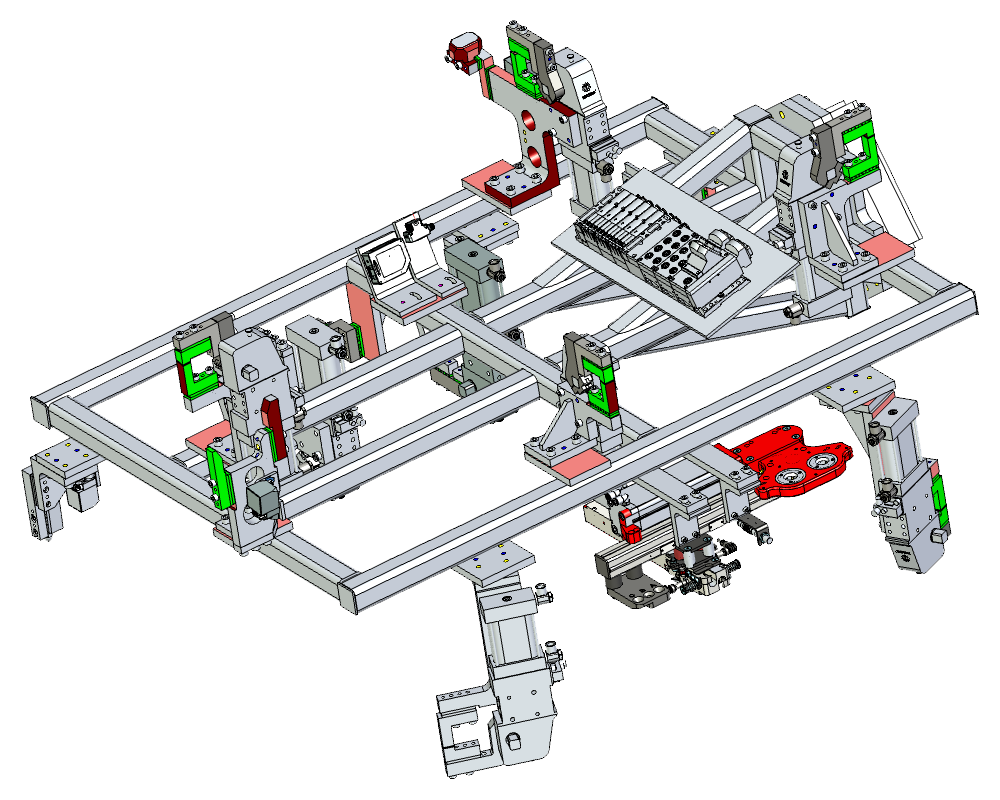
Material Handling End of Arm Tooling (EOAT), or end effector, is manipulated through programmed sequences to perform specific part handling and transfer functions. Typically, the robot controller will control the gripper clamps using digital Input /Output (I/O) modules. Each material handling EOAT is made for a specific application.
The Material Handling Robot 2V07=V01AR41 is located at Station 030 on the ABB 7th Axis Slide Unit.

Major Components
The Material Handling End of Arm Tooling (EOAT) features the following components.
| Item | Description | Function |
|---|---|---|
| A | Pneumatic Panel | Controls the pneumatics for the material handler. Also sends and receives signals to the Programmable Logic Controller (PLC). |
| B | Tunkers Clamp | Secures the part during the transportation of the part. |
| C | Inductive Sensor | Detects the presence or absence of metal objects without making physical contact with them. It works on the principle of electromagnetic induction. When a metal object is brought near the sensor, it disturbs the electromagnetic field produced by the sensor, which in turn causes a change in the sensor output signal. |
| D | Double Tip Changer | Removes and replaces caps from the pedestal welder. |