Material Handling End of Arm Tooling
General
Material Handling End of Arm Tooling (EOAT), or end effector, is manipulated through programmed sequences to perform specific part handling and transfer functions. Typically, the robot controller will control the gripper clamps using digital Input / Output (I/O) modules. Each material handling EOAT is made for a specific application.
There are two (2) Material Handling End of Arm Tooling located on the 2V13 Sub Floor Cross Member Cell.
- 2V13=V01AR41UQ41
- 2V13=V01AR42UQ41
Major Components
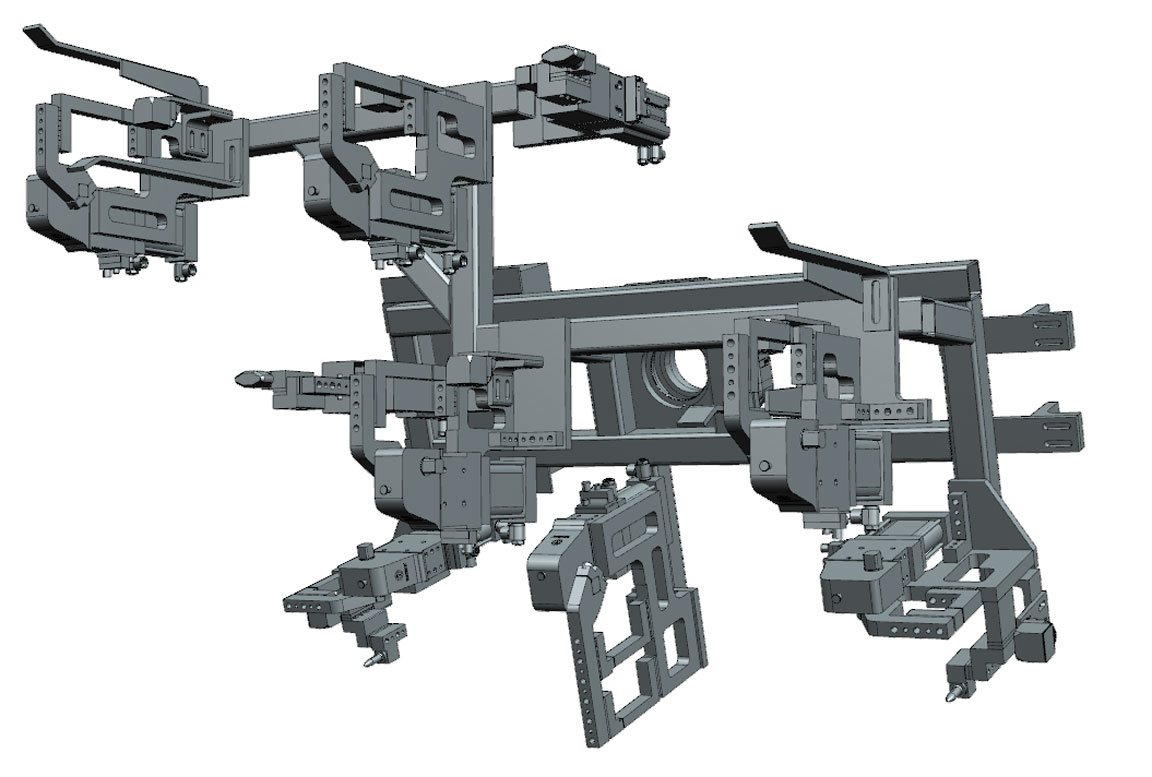
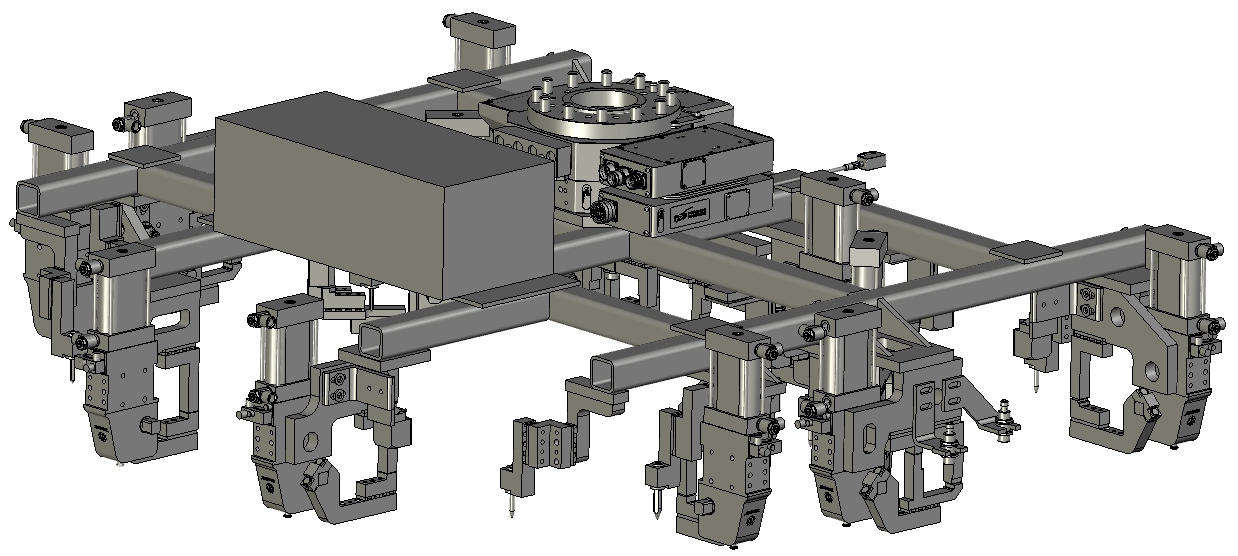
The Material Handling End of Arm Tooling (EOAT) features the following internal components.
| Item | Description | Function |
|---|---|---|
| A | Tool Changer | Helps in the swapping of tools from the Robot to the Weld Gun Change Stand or EOAT Storage Rack and visa versa. |
| B | Tunkers Clamp | Secures the part during the transportation of the part. |
| C | Rough Locators | Ensures parts are properly loaded onto the material handler. They provide a way for the robot to align and place the parts. |
| C | Guided Actuator | Provides precise positioning and guidance for the tooling as it locates and locks the part into position. |